
Descoperim, înțelegem, exemplificăm
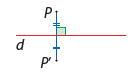
Fie P un punct exterior dreptei d. Simetricul punctului P față de dreapta d este punctul P’, cu proprietatea că d
este mediatoarea segmentului PP’.
Dreapta d este axă de simetrie pentru mulțimea de puncte {P, P’}.
Observație. Dacă P’ este simetricul punctului P față de dreapta d, atunci P
este simetricul punctului P’ față de dreapta d.
Am stabilit că simetricul unui punct P față de dreapta d este punctul P’, unde PP’ ⊥ d, iar P și P’ sunt egal depărtate
de dreapta d. Această abordare ne oferă o tehnică de reprezentare geometrică rapidă a simetricului unui
punct față de o dreaptă.
Pasul 1.
Se reprezintă dreapta d și punctul P.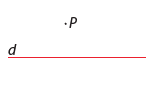
Se reprezintă dreapta d și punctul P.
Pasul 2.
Se construiește dreapta PM ⊥ d, M ∈ d.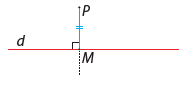
Se construiește dreapta PM ⊥ d, M ∈ d.
Pasul 3.
Se marchează punctul P’ pe dreapta PM, astfel încât M să fie mijlocul segmentului PP’.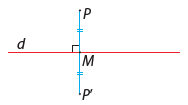
Se marchează punctul P’ pe dreapta PM, astfel încât M să fie mijlocul segmentului PP’.

Știm să aplicăm, identificăm conexiuni
În practică, constatăm cu ușurință că simetrica unei figuri geometrice față de o dreaptă este o figură geometrică
congruentă cu cea inițială, formată din simetricele punctelor figurii date față de axa dată.
Ne propunem să stabilim ce reprezintă simetricele unor figuri geometrice simple față de o dreaptă dată.
Aplicația 1.
Simetricul segmentului AB față de dreapta d este segmentul A1B1, unde A1 este simetricul lui A față de dreapta d, iar B1 este simetricul lui B față de dreapta d.
Simetricul segmentului AB față de dreapta d este segmentul A1B1, unde A1 este simetricul lui A față de dreapta d, iar B1 este simetricul lui B față de dreapta d.
a)
Realizați pe caiete un desen după modelul celui din imaginea alăturată.
b)
Verificați cu ajutorul compasului congruența AB ≡ A1B1.
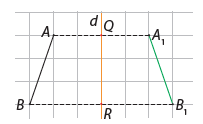
Segmentul A1B1 este simetricul segmentului AB față de dreapta d , iar segmentul AB este simetricul segmentului
A1B1 față de dreapta d. Dreapta d este axă de simetrie pentru reuniunea segmentelor AB și A1B1.
Aplicația 2.
Simetricul unghiului AOB, oarecare, față de dreapta d, este unghiul A1O1B1, unde: A1 este simetricul lui A față de dreapta d; O1 este simetricul lui O față de dreapta d și B1 este simetricul lui B față de dreapta d.
Simetricul unghiului AOB, oarecare, față de dreapta d, este unghiul A1O1B1, unde: A1 este simetricul lui A față de dreapta d; O1 este simetricul lui O față de dreapta d și B1 este simetricul lui B față de dreapta d.
a)
Realizați pe caiete un desen după modelul celui din imaginea alăturată.
b)
Verificați cu ajutorul raportorului congruența ∢AOB ≡ ∢A1O1B1.
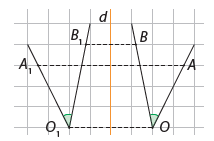
Unghiul A1O1B1 este simetricul unghiului AOB, față de dreapta d, iar unghiul AOB este simetricul unghiului
A1O1B1, față de dreapta d.
Dreapta d este axă de simetrie pentru mulțimea punctelor celor două unghiuri.
Dreapta d este axă de simetrie pentru mulțimea punctelor celor două unghiuri.
160
Matematică • Manual pentru clasa a VI-a
Axe de simetrie ale figurilor geometrice
Apasă butonul Redă şi priveşte cu atenţie.